For the past two days I have literally lost my patience with Qik 2s9v1 dual serial motor controller. I have referred so many website and I could not make this controller work. After hours of searching I found this library which was compatible with Arduino 1.0. Now I got a library which can used to communicate with the controller but the commands I send was not getting received. I posted in Pololu forum and I didn’t get a reply. Today I joined Sparkfun IRC chatroom and requested for help. @agmlego helped me in resolving the issue. I was using wrong baud rate for serial communication. Once that got the issue resolved I jumped into controlling the motor using a Proximity Sensor.
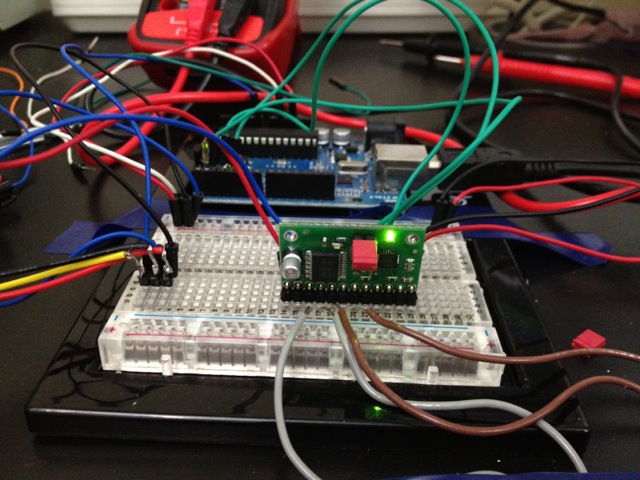
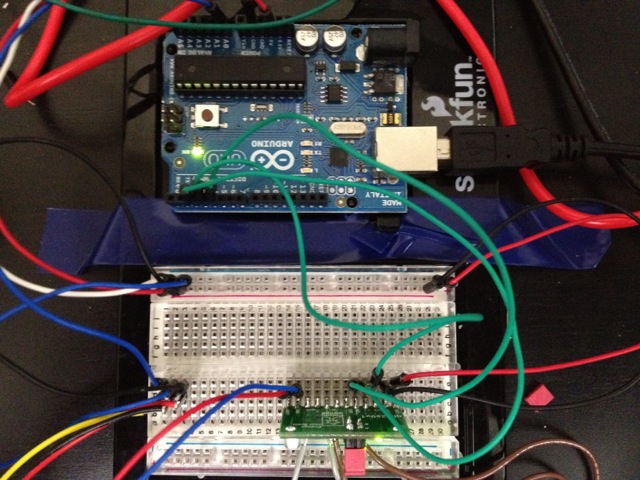


The mission was to change the motor rotation to reverse if any object is close by.
#include <CompactQik2s9v1.h>
#include <SoftwareSerial.h>
/*
Important Note:
The rxPin goes to the Qik's "TX" pin
The txPin goes to the Qik's "RX" pin
*/
#define rxPin 2
#define txPin 3
#define rstPin 4
#define sensorIR A0
float sensorValue, inches;
SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
CompactQik2s9v1 motor = CompactQik2s9v1(&mySerial,rstPin);
void setup() {
Serial.begin(9600);
mySerial.begin(38400);
motor.begin();
motor.stopBothMotors();
}
void loop() {
inches = 0;
for(int i = 0; i < 5; i++){
sensorValue = analogRead(sensorIR);
inches = inches + ( 4192.936 * pow(sensorValue,-0.935) - 3.937);
delay(100);
}
inches = inches / 5;
if(inches < 8.0){
motor.motor0Reverse(127);
motor.motor1Reverse(127);
}else{
motor.motor0Forward(127);
motor.motor1Forward(127);
}
Serial.print("Inches: ");
Serial.println(inches);
}
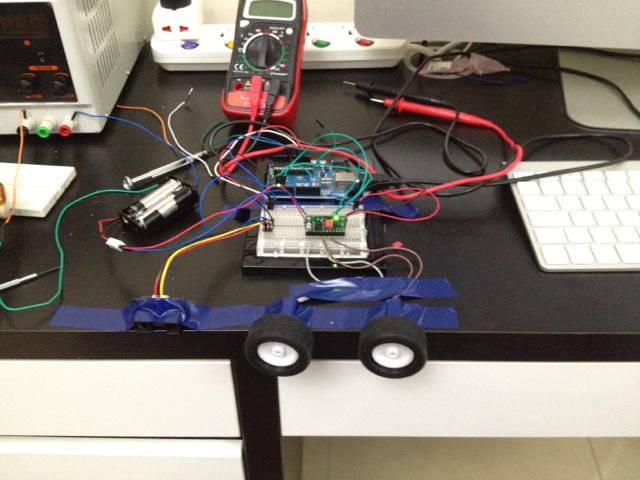
I am really happy with the progress, I hope these reference bellow helps 😉
Reference: Qik Dual Serial Motor Controller, Infrared Proximity Sensor, Micro Metal Gear motor, CompactQik2s9v1, Long Range Infrared
PS: If anyone needs help with the connection please feel free to contact me.
Kewl. I dont want any reference. I want the CAR! finish it fast bro! Super cool work. keep working on it.!